TECNOLOGÍA 3ER PERIODO
SISTEMAS DE UN ROBOT
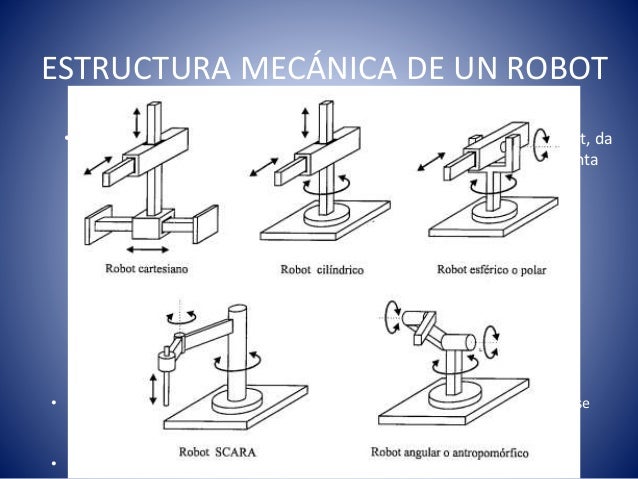
SISTEMA MECÁNICO:
Está formado por los componentes que hacen posible el movimiento del robot. Encontramos los siguientes componentes:
- los motores o actuadores, que transforman la energía eléctrica en mecánica.
- Las articulaciones, que unen dos piezas móviles del robot.
- Las piezas auxiliares, como los engranajes, poleas, tubos y ruedas.
- La estructura interna y externa que puede ser de diferentes materiales, como el plástico y metales



- recibe información del entorno y equivale a los sentidos del ser humano. Sus componentes son los sensores. Dependiendo del trabajo que realice el robot, podemos encontrar diferentes tipos de sensores. Los más comunes son:Sensores de sonido, que permiten detectar al robot las ondas sonoras.
- Sensores de distancia, que permiten determinar la proximidad o lejanía de un objeto.
- Sensores de contacto, que se activan cuando un objeto los toca.
- Sensores de luz, capaces de detectar un aumento o disminución de luminosidad o incluso color.
- Sensores de temperatura, que recogen datos de temperatura ambiente o de un objeto.





- 2 baterías 3 voltios
- 1 motor 3 voltios
- 1 interruptor
- 4 tapas de gaseosa
- 2 pinchos
- 1 tabla de madera pequeña
- 1 botella
- 1 caucho
- 1 piñón en la tracción delantera





El grupo de investigación ERICA de la Universidad de Valladolid (España) formará parte de dos proyectos espaciales para 2020.
Cada una de las misiones cuenta con objetivos y avances tecnológicos distintos:
- Misión Exomars: la misión Exomars se llevará a cabo junto a la ESA (European Space Agency). Para esta misión los investigadores de Valladolid desarrollaron el instrumento Raman. La función de este avance tecnológico es detectar signos de vida en Marte.
- Misión Mars: proyecto que se ejecutará junto a la NASA (National Aeronautics and Space Administration). En esta oportunidad los avances tecnológicos desarrollados por ERICA permitirán analizar la química y la superficie de Marte mediante técnicas espectroscópicas.
avances tecnológicos para la conectividad a internet
Navegar por internet a través de redes inalámbricas será una experiencia mucho más avanzada y efectiva con los avances tecnológicos que se han estado desarrollando. A continuación se mencionan las características de las conexiones inalámbricas más potentes para el 2020:
- 5G: la quinta generación de conectividad móvil inalámbrica promete ser hasta 100 veces más rápida que la 4G, alcanzando conexiones que superarán los 10Gbps. Esto permitirá acceder a la nube en tiempo real, descargar archivos de gran tamaño de forma casi instantánea, mejorar la comunicación peer-2-peer y la conectividad incluso en lugares muy remotos, contar con internet de banda ancha con amplia cobertura, entre muchas otras ventajas.
Marcas como Xiaomi ya anuncian sus avances tecnológicos en productos 5G.
- Wi-Fi 6: la mejorada tecnología inalámbrica de Wi-Fi tendrá una velocidad superior a las versiones anteriores y su capacidad de rendimiento será impresionante mejor, incluso en entornos con muchos dispositivos conectados. La Wi-Fi Alliance afirma que con este avance tecnológico la conectividad a internet será muy efectiva para, por ejemplo, ver una película en alta definición o para gestionar aplicaciones comerciales que requieren un gran ancho de banda.
De esta manera, la tecnología aplicada a la conectividad online por métodos inalámbricos será un pilar de desarrollo para las comunicaciones en España.
impresión de metales en 3D

Las impresoras 3D llevan varias años entre nosotros. Les hemos dado usos tan variados y útiles, como la construcción de casas completas, hasta de formas peligrosas, logrando imprimir armas funcionales de plástico. El siguiente paso en estas maquinas: los metales. Las últimas versiones ya son capaces de crear piezas metálicas de manera rápida, económica y útil.
En poco tiempo veremos como estos productos lograrán revolucionar los proceso de fabricación en serie, ya que te permiten crear piezas más ligeras, fuertes, con formas completas, incluso imposibles de lograr con los métodos actuales.
Embriones artificiales

Investigadores de la Universidad de Cambridge lograron desarrollar embriones de ratón a partir de células madres, sin óvulo ni esperma, solo tomaron las células de otro embrión. Este impresionante logro tiene un potencial ilimitado.
Los científicos pronto podrás utilizar embriones humanos sintéticos para poder investigar mejor esta etapa, lo que daría paso a la edición genética para su investigación, entre otros. Aunque deja abierto el debate ético ¿hasta qué punto estamos dispuestos a experimentar?
redes neuronales antagónicas

En la actualidad, la inteligencia artificial ya es capaz de identificar un gato dentro de millones de imagenes. Lo vemos aplicado en nuestros teléfonos diariamente sin darnos cuenta. Cuando buscas elementos específicos en tu biblioteca de fotos por ejemplo.
Sin embargo, todavía no es capaz de crear, algo que con los últimos avances podría cambiar. Gracias a la creación de un sistema dual de inteligencia artificial que trabaja a duo, pueden adquirir “imaginación” para poder crear imagenes ultrarealistas. Este modelo de redes generativas antagónicas utiliza dos redes neuronales y las enfrenta mutuamente en un juego similar al gato y el ratón.
Traducción inmediata

Este año Google presentó Pixel Buds, sus audífonos inalámbricos para competir contra los AirPods de Apple. Fue promocionado con gran emoción de parte de la compañía. Una de sus ventajas más interesantes que destacaron fue su capacidad de traducir de forma automática todo lo que escucha el usuario, en una conversación. Claro, debes utilizar un Google Pixel y tener la aplicación abierta apuntando al otro interlocutor, pero la tecnología detrás es lo que nos llamó la atención. Pixel Buds es un producto que recibió muchas criticas durante su lanzamiento, tanto en su diseño extraño, como a sus pocas funciones para otros dispositivos que no fuesen el teléfono de Google.
Predicciones genéticas

Los científicos ya pueden utilizar nuestro genoma para predecir las probabilidades de sufrir alguna enfermedad hereditaria. Estas predicciones basadas en el ADN, serán sin duda uno de los grandes avances en salud pública. Bajo este sistema, podrán estimar el riesgo de sufrir enfermedades como el Alzheimer o cáncer.
Salto cuántico de materiales

Por mucho tiempo, la computación cuántica ha estado en etapas muy tempranas de investigación. Se cree que será capaz de realizar millones de millones de operaciones por segundo. No hace muy poco, investigadores de IBM utilizaron su computadora cuántica de 7 cubits, para producir una molécula de tres átomos, lo que según el MIT podrá servir para desarrollar fármacos más efectivos, entre otras aplicaciones civiles.
trabajos tinkercard:
https://www.tinkercad.com/things/l34cHVA02Mi-glorious-kup/editel?sharecode=UZxtNjJ9MeP8EbMLglCP8ctsRoV_O9DAiVmlcUXLg7s



EXPOCIENCIA

ROBÓTICA
¿QUE ES?
La robótica es la ciencia y tecnología para diseñar y construir máquinas capaces de imitar tareas humanas llegando a recrear inteligencia. La robótica, gracias a los avances actuales, ha dado un salto conceptual desde la ciencia ficción hacia la ciencia tecnológica.
La palabra robótica fue acuñada por primera vez en el año 1921 por el escritor checo Karel Capek (1890-1938) pero popularizado por el escritor ruso-americano de ciencia ficción Isaac Asimov de quién se deben las 3 leyes de la robótica:
- Primera ley: “Un robot no le hará daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.”
- Segunda ley: “Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entran en conflicto con la primera ley.”
- Tercera ley: “Un robot debe proteger su propia existencia en la medida que su protección no entre en conflicto con la primera y segunda ley.”
Las máquinas que construye la robótica se llaman robots. La robótica hoy en día es una ciencia interdisciplinaria porque conjuga conocimientos de la ingeniería mecánica, ingeniería eléctrica, electrónica, ciencias de la computación, llegando hasta áreas como la biología
Existen varios tipos de robots empezando con los de primera generación como los manipuladores hasta la cuarta generación que serían los robots ‘inteligentes’:
- Robot industrial: como por ejemplo el brazo mecánico industrial.
- Manipulador: como por ejemplo el empacador, cargador y descargador de una fábrica.
- Terrestre: algunos tienen formas de insectos, otros tienen ruedas y otros se paran en dos piernas llamados robots androides.
- Aéreos: tienen forma de avión o de helicóptero.
- Investigación: por ejemplo el vehículo explorador tipo rover que la NASA usa para explorar el planeta Marte.
- Didácticos o de entretenimiento: son generalmente de consumo diario como las mascotas electrónicas.
- Bioingeniería robótica: junta la biología, la ingeniería, la electrónica y la robótica para crear prótesis y prototipos para el área de la medicina.
- Androides: robots ‘inteligentes’.
¿QUE ES?
DISEÑAR:
El diseño se define como el proceso previo de configuración mental, «prefiguración», en la búsqueda de una solución en cualquier campo. Se aplica habitualmente en el contexto de la industria, ingeniería, arquitectura, comunicación y otras disciplinas que requieren creatividad. El diseño involucra variadas dimensiones que van más allá del aspecto, la forma y el color, abarcando también la función de un objeto y su interacción con el usuario. Durante el proceso se debe tener en cuenta además la funcionalidad, la operatividad, la eficiencia y la vida útil del objeto del diseño.
FASES O ETAPAS DEL DISEÑO:
El proceso de diseñar, suele implicar las siguientes fases:
1. Observar y analizar el medio en el cual se desenvuelve el ser humano, descubriendo alguna necesidad. Para esto a menudo se utilizan preguntas como: qué, cómo, por qué, para quién, dónde y cuándo, las que facilitan y esclarecen el proceso de diseño.
2. Evaluar, mediante la organización y prioridad de las necesidades identificadas.
3. Planear y proyectar proponiendo un modo de solucionar esta necesidad, por medio de planos y maquetas, tratando de descubrir la posibilidad y viabilidad de la(s) solución(es).
4. Ver, construir y ejecutar llevando a la vida real la idea inicial, por medio de materiales y procesos productivos.
Estos cuatro actos, se van haciendo uno tras otro, y a veces continuamente. Algunos teóricos del diseño no ven una jerarquización tan clara, ya que estos actos aparecen una y otra vez en el proceso de diseño.
Hoy por hoy, y debido al mejoramiento del trabajo del diseñador (gracias a mejores procesos de producción y recursos informáticos), podemos destacar otro acto fundamental en el proceso:
Diseñar como acto cultural implica conocer criterios de diseño como presentación, producción, significación, socialización, costos, mercadeo, entre otros. Estos criterios son innumerables, pero son contables a medida que se definen los proyectos del diseño.
¿QUE ES?
CONSTRUIR:
En los campos de la arquitectura e ingeniería, la construcción es el arte o técnica de fabricar edificios e infraestructuras. En un sentido más amplio, se denomina construcción a todo aquello que exige, antes de hacerse, disponer de un proyecto y una planificación predeterminada.
También se denomina construcción a una obra ya construida o edificada, además a la edificación o infraestructura en proceso de realización, e incluso a toda la zona adyacente usada en la ejecución de la misma.
ETAPAS:
El proceso de una construcción se divide en varias fases que están asociadas a diversos oficios.
Previamente, se elabora un Proyecto redactado por arquitectos y/o ingenieros
que contiene, básicamente, la memoria, el presupuesto y los planos.
Documentos del proyecto
- Memoria
- Describe los diversos aspectos de la edificación, incluyendo la normativa a cumplir, pliegos de condiciones, etc.
- Presupuesto o cálculo de costos
- El cálculo de todos los gastos especificando: materiales, mano de obra y medios auxiliares: maquinaria necesaria y transporte (flete) para disposición de los mismos, etc.
- Planos
- Planos arquitectónicos, de estructura, instalaciones, impermeabilizaciones, aislamientos, elementos complementarios, acabados, detalles, urbanización, etc.
Fases de la obra
- Vallado de obra e implantación de casetas de obra y grúas.
- Cierres perimetrales auxiliares: Se instalan antes de iniciar una obra. Protegen y separan la construcción u obra de los espacios públicos. Suele ser de materiales ligeros, para facilitar su rápida instalación y posterior desinstalación.
- Instalación de casetas de obras (faenas) y casetas auxiliares: oficinas técnicas, vestuarios y servicios. Suelen ser contenedores o bóvedas provisionales, en donde se almacenan los documentos referentes a la obra: planos, cálculos, memorias técnicas, etc. Además es el lugar de trabajo de los profesionales de obra.
- Preparación del terreno
- Limpieza del terreno: Se lleva a cabo con la ayuda de máquinas tales como retroexcavadoras, pero básicamente se trata de eliminar toda materia extraña tales como arbustos, basura, hierba, etc.
- Nivelación: Se rellenan o retiran los desniveles del terreno con uso de maquinaria o de instrumentos como palas dependiendo del tipo de construcción.
- Muros de contención: Si el proyecto lo requiere se necesitará la ejecución de muros de contención con el fin de conseguir los niveles deseados del terreno.
- Replanteo: Se marcan las dimensiones de la base, así como las líneas generales de la estructura.
- Excavación general. Replanteo de la cimentación y el saneamiento.
- Cimentación
- Excavación de las zanjas de cimentación: al excavar se busca una zona de dureza aceptable, el plano de asiento de la cimentación. Encofrado y hormigonado de la cimentación, pilares y muros de sótano.
- Estructura general
- Encofrado y hormigonado de pilares, forjados, losas de escaleras, etc.
- Cubierta
- Terminar la cubierta suponía una fase muy importante de la obra, pues permitía poder intervenir a la mayoría de los oficios. En España se celebraba, en el siglo XX, instalando una bandera en la zona más alta.
- Instalaciones
- De agua potable, electricidad, iluminación física, calefacción, saneamiento, y telecomunicaciones, complementadas a veces con gas natural , energía solar, aire acondicionado, domótica, sistemas contra incendios y sistemas de seguridad.
Se consideran instalaciones especiales los ascensores, transformadores de electricidad, equipos de bombeo, extractores industriales, conductos verticales de basuras, paneles solares, etc. - Cerramientos perimetrales
- Muros de fachada y medianeros, precercos de ventanas.
- Impermeabilizaciones y aislamientos
- Impermeabilización de cubiertas, losas, muros, cisterna, etc. Aislamientos acústicos y térmicos.
- Cerramientos interiores
- Tabiquería y precercos de puertas.
- Acabados interiores
- Yesos y escayolas.
- Solados y alicatados.
- Losetas y mármoles.
- Pinturas y tapices.
- Carpintería
- Puertas y ventanas de madera. Persianas.
- Cerrajería
- Puertas y ventanas metálicas. Rejas.
- Cristalería
- Pinturas y otros acabados
- Colocación de muebles sanitarios
- Montaje e instalación de lavabos, tazas de baño, bañeras, etc.
- Urbanización
- Comprende el ajardinamiento y pavimentación de patios y aceras, incluyendo sus instalaciones y mobiliario. Las diversas fases descritas se suelen solapar parcialmente.
- ¿QUE ES?
PROGRAMAR:
La programación es el proceso utilizado para idear y ordenar las acciones necesarias para realizar un proyecto, preparar ciertas máquinas o aparatos para que empiecen a funcionar en el momento y en la forma deseados o elaborar programas para su empleo en computadoras.
En la actualidad, la noción de programación se encuentra muy asociada a la creación de aplicaciones de informática y videojuegos. En este sentido, es el proceso por el cual una persona desarrolla un programa, valiéndose de una herramienta que le permita escribir el código (el cual puede estar en uno o varios lenguajes, como c++, java y python, entre otros) y de otra que sea capaz de “traducirlo” a lo que se conoce como lenguaje de maquina, que puede "comprender" el microprocesador
OBJETIVOS DE PROGRAMACIÓN:
La programación debe perseguir la obtención de programas de calidad. Para ello se establece una serie de factores que determinan la calidad de un programa. Algunos de los factores de calidad más importantes son los siguientes:
- correctitud: Un programa es correcto si hace lo que debe hacer tal y como se estableció en las fases previas a su desarrollo. Para determinar si un programa hace lo que debe, es muy importante especificar claramente que debe hacer el programa antes de su desarrollo y, una vez acabado, compararlo con lo que realmente hace. Al verificar este comportamiento está cumpliendo dicho objetivo.
- Claridad. Es muy importante que el programa sea lo más claro y legible posible, para facilitar tanto su desarrollo como su posterior mantenimiento. Al elaborar un programa se debe intentar que su estructura sea sencilla y coherente, así como cuidar el estilo de programación. De esta forma se ve facilitado el trabajo del programador, tanto en la fase de creación como en las fases posteriores de corrección de errores, ampliaciones, modificaciones, etc. Fases que pueden ser realizadas incluso por otro programador, con lo cual la claridad es aún más necesaria para que otros puedan continuar el trabajo fácilmente. Algunos programadores llegan incluso a utilizar Arte ASCII para delimitar secciones de código; una práctica común es realizar aclaraciones en el mismo código fuente utilizando líneas de comentarios. Contrariamente, algunos programadores realizan acciones que tienden introducir confusión para impedir un análisis cómodo a otros programadores, recurren al uso de código ofuscado,
- Eficiencia. Se trata de que el programa, además de realizar aquello para lo que fue creado (es decir, que sea correcto), lo haga gestionando de la mejor forma posible los recursos que utiliza. Normalmente, al hablar de eficiencia de un programa, se suele hacer referencia al tiempo que tarda en realizar la tarea para la que ha sido creado y a la cantidad de memoria que necesita, pero hay otros recursos que también pueden ser de consideración para mejorar la eficiencia de un programa, dependiendo de su naturaleza (espacio en disco que utiliza, tráfico en la red que genera, etc.).
- portabilidad:Un programa es portable cuando tiene la capacidad de poder ejecutarse en una plataforma, ya sea hardware o software, diferente a aquella en la que se desarrolló. La portabilidad es una característica muy deseable para un programa, ya que permite, por ejemplo, a un programa que se ha elaborado para el sistema GNU/Linux que también pueda ejecutarse en la familia de sistemas operativos Windows. Consecuentemente el programa puede llegar a más usuarios.
partes de un robot:
Estructura general de un robot
Se componen de cuatro partes fundamentales, donde la importancia de cada una de ellas dependerá de la tarea concreta para la que fue construido. Presentamos en la imagen las siguientes partes que se describen a continuación:

a) Armazón o esqueleto del robot
El armazón es como el esqueleto de un ser humano. Es la parte que soporta los componentes del que esta compuesto el robot. Una característica es su robustez, el tipo de material, facilidad para el cambio y del tipo de trabajo a desempeñar.
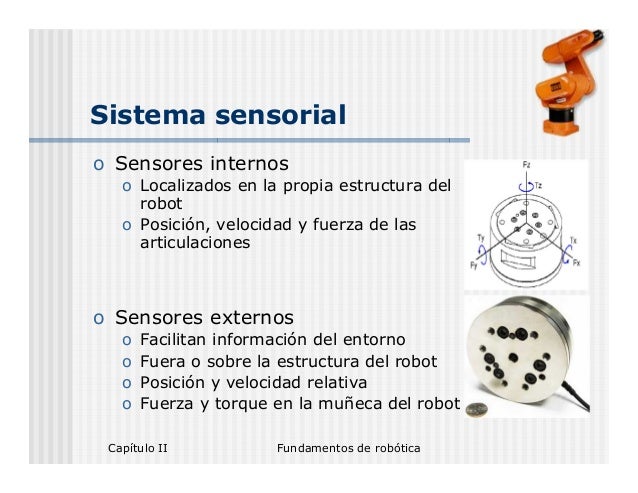
b) Sensores o receptores de estímulos
Todo robot debe tener un desenvolvimiento adecuado gracias a los estímulos externos que recibe del exterior. Para estos los sensores deben ser adecuado a la tarea a realizar y colocados de manera estratégica sobre la estructura. Los principales tipos de sensores son:
- Sensor infrarrojo.- Mide distancia, basado en un sistema de emisión/recepción de radiación en el espectro de los infrarrojos (menor que las ondas de radio y mayor que la luz).
- Sensor de proximidad (Rango).- Se utilizan para la detección de presencia de obstáculos sin necesidad de contacto y se utilizan para medir distancias. Esta información es de vital importancia en los robots, especialmente si se mueven en entornos no estructurados que requieran de la capacidad para construir mapas del entorno y evitar obstáculos cercanos.
- Sensor de ultrasonido.- son muy frecuentes en los robots móviles (particularmente) y de forma significativa en los UAVs (Vehículos autónomos bajo el agua) por sus buenas propiedades de medición en entornos acuáticos y sirven para detectar objetos y medir distancias. Se utilizan para construir mapas del entorno y evitar obstáculos.
- Sensor de telemetrìa.- Esta basado en la tecnología LIDAR (de los términos «light» y «radar»). El sensor emite un rayo láser, que rebota sobre objetos de manera no especular para calculara distancia a un objeto. El receptor (dentro del propio sensor) recibe el rayo devuelto, y mediante el tiempo de vuelo se calcula la distancia al objeto apuntado.Dada la gran velocidad de la luz, el rayo es devuelto en muy poco tiempo, lo que permite hacer un barrido 2D o 3D para obtener más datos del entorno.
c) Actuadores
El robot luego de captar y procesar los datos del entorno, el robot deberá procesarlo para desempeñar la tarea programada. Esto se lleva a cabo mediante el uso de actuadores que comúnmente son motores eléctricos. La función del motor es darle desplazamiento para lograr su objetivo. De igual manera como ocurre con la estructura o los sensores, va a depender del trabajo a realizar. Es asi que unos va necesitar mas potencia y otros como un rastreador necesita mas velocidad.
d) Tarjeta de control o cerebro del robot
Para que exista el movimiento o acción del robot por parte de los estímulos externo, se hace a través de un lógica de control que rije el comportamiento de la maquina. Por lo general se trata de sistemas basado en microcontroladores que programados de manera conveniente resuelven de forma optima los objetivos de una aplicacion. Hoy en dia ya viene insertados en tarjetas de desarrollo de múltiple propósito como por ejemplo las tarjetas Arduino que no es mas que una placa compuesta por microcontroladores y microprocesadores.
El estudio de los microcontroladores mas comunes que se usan en estos sistemas de control merecen un capítulo aparte.
sistemas de un robot:
SISTEMA MECÁNICO:
Está formado por los componentes que hacen posible el movimiento del robot. Encontramos los siguientes componentes:
- los motores o actuadores, que transforman la energía eléctrica en mecánica.
- Las articulaciones, que unen dos piezas móviles del robot.
- Las piezas auxiliares, como los engranajes, poleas, tubos y ruedas.
- La estructura interna y externa que puede ser de diferentes materiales, como el plástico y metales
- recibe información del entorno y equivale a los sentidos del ser humano. Sus componentes son los sensores. Dependiendo del trabajo que realice el robot, podemos encontrar diferentes tipos de sensores. Los más comunes son:Sensores de sonido, que permiten detectar al robot las ondas sonoras.
- Sensores de distancia, que permiten determinar la proximidad o lejanía de un objeto.
- Sensores de contacto, que se activan cuando un objeto los toca.
- Sensores de luz, capaces de detectar un aumento o disminución de luminosidad o incluso color.
- Sensores de temperatura, que recogen datos de temperatura ambiente o de un objeto.
actuadores:
En robótica los actuadores son los encargados de generar el movimiento de los diferentes mecanismos o elementos que conforman el robot. Los actuadores eléctricos se utilizan principalmente en robots que no demanden de altas velocidad ni potencia.

controladores:
El controlador es el componente del robot que procesa la información captada por los sensores, y según las instrucciones del programa que almacena, regula el movimiento de los motores u otros dispositivos de salida.

sensores:
Sensor de distancias por ultrasonidos para Robonova 1 que incluye un sensor Maxsonar EZ1 con cable de conexión tipo servo y una carcasa frontal especialmente mecanizada para alojar el sensor en su interior. El sensor utilizado esta basado en el sensor de ultrasonidos Maxsonar EZ1 que destaca por su pequeño tamaño y bajo consumo. El sensor MaxSonar- EZ1 detecta objetos situados entre 0 y 6,45 metros de distancia, proporcionando los datos obtenidos del cálculo de la distancia con una resolución de 1 pulgada (2,54 cm). El sensor se atornilla en el interior de la carcasa frontal incluida de forma que se sitúa en la parte central del pecho del Robonova. El sensor incluye un cable de conexión tipo servo para conectarlo directamente en el circuito de control del Robonova. Se incluyen el sensor, la carcasa y los tornillos

Este comentario ha sido eliminado por el autor.
ResponderBorrar